Difference between revisions of "London Science Museum"
From Londonhua WIKI
(→Valentina Tereshkova) |
Mthatfalvi (talk | contribs) |
||
| Line 19: | Line 19: | ||
=Overview= | =Overview= | ||
| − | The science museum started in 1857 as part of the South Kensington Museum under Bennet Woodcroft.<ref name = "his">Museum history. (n.d.). Retrieved June 01, 2017, from http://www.sciencemuseum.org.uk/about-us/history</ref> According to the timeline of events, the Patent Office Museum also opened on the site.<ref name = "his"/> It wasn't until 1862 when the Science collections move to separate buildings on Exhibition Road. In 1909, the Science and Engineering collections housed and running | + | The science museum started in 1857 as part of the South Kensington Museum under Bennet Woodcroft.<ref name = "his">Museum history. (n.d.). Retrieved June 01, 2017, from http://www.sciencemuseum.org.uk/about-us/history</ref> According to the timeline of events, the Patent Office Museum also opened on the site.<ref name = "his"/> It wasn't until 1862 when the Science collections move to separate buildings on Exhibition Road. In 1909, the Science and Engineering collections housed and running separately at the time officially got the name Science Museum which is kept today.<ref name = "his"/> |
<br><br> | <br><br> | ||
__TOC__ | __TOC__ | ||
Latest revision as of 13:00, 22 June 2017
London Science Museum
 Science Museum | |
| Artist | Attributed to Christine Matthews [CC BY-SA 2.0 (http://creativecommons.org/licenses/by-sa/2.0)], via Wikimedia Commons |
|---|---|
| Year | 2008 |
| Location | Science Museum, Exhibition Road, London |
Overview
The science museum started in 1857 as part of the South Kensington Museum under Bennet Woodcroft.[1] According to the timeline of events, the Patent Office Museum also opened on the site.[1] It wasn't until 1862 when the Science collections move to separate buildings on Exhibition Road. In 1909, the Science and Engineering collections housed and running separately at the time officially got the name Science Museum which is kept today.[1]
Contents
Background
Begin writing the background information of this article, or use this format to begin a new article with some other relevant section filled with important information.
Level 0
Wounded
The first world war was an introduction to a new kind of War in which large armies with powerful weapons produced casualty levels unparalleled to any wars previous in scale and severity. On the battlefield, conditions were dependent on medical evacuation, treatment, and care. Medical teams faced new challenges such as the need to immediate save soldiers lives on the battlefield as well as the need for long term care at home. The need for new techniques, technologies and strategies were needed while others strategies were adapted and evolved. The personal impact of this war lasted for decades and many lives of those wounded were changed forever. This war however caused Great Britain to develop better centers of medical care and welfare and medical care facilities that specialized in the treatment and rehabilitation of those who need. This war increase the social awareness towards the new generation of disabled veterans.
Vulnerable Bodies
Due to the fact that new industrialized weapons were being used, soldiers on the West Front were extremely susceptible to injury. Their gas masks, helmets, and body armor gave little protection and the trenches did help to diminish the injuries, however escaping injury was mostly out of pure luck. Gas became a new and frightening reality to these soldiers and the gas helmets became part of the soldier's arsenal. Many men fears facial wounds that could damage their appearances' and paralysis on the battlefields. However, some hoped for superficial wounds so that they could get out of the war and go back home.
The Chain of Evacuation
After a soldier was hit, there was a long and complex medical journey to get help. Depending on the injuries, a wounded soldier could be taken to a number of different medical personnel, locations, and receive different medical treatments ranging from first aid to a full blown surgery. There were four sequential treatment centers that were involved in getting treatment for injuries, which were The Regimental Aid and Posts, Dressing Stations, Casualty Clearing Stations, and Base Hospitals. At each location the soldiers were assessed and prioritized.
Treatment
During the war on the Western Front, there was a huge need for medical aid unlike any of the other areas. Though some of the wounds received were superficial, many were debilitating or even fatal. Many wounds had heavy blood loss, which meant patients could bleed out before getting to the operating table. Blood loss containment was the primary goal with serious injuries. During this war there was also a heavy use of X-rays and other medical advancements. Many of these technologies became portable and were very important on the battlefield.
Our Lives in Data
Every day more and more data is collected. Data is collected from taking pictures, morning commutes, and more of our lives are being recorded as data every day. When you look at this data is shows patterns which help us see things that we could not see before. By looking at our world through data it provides a new perspective. This collection of data is known as 'big data'.
Examples of data being collected and its use:
Search histories show our fears, journey data shows how cities are growing, smartphones show where traffic jams are, social media profiles reveal a lot about our personalities, energy meters can tell when we are home. What we purchase reveals life events, ebooks can measure our reading speeds, social media posts reveal who'll win an election, and so on and so on.
There are many small interactive exhibits inside the Our Lives in Data exhibit. One of them asks you a series of questions and determines how willing you are to share information. Another just by taking your picture compares it with the other data it has received to predict your age, gender, and happiness level. There is a display on the data collected from tube stations, and one on how much data is collected through Facebook.



Energy Hall
Text here
Exploring Space
Valentina Tereshkova
On June 16th, 1963 Valentina Tereshkova ascended into space, making her the first woman to travel to space. This was an extremely major victory for women in space exploration and it took another twenty years before any other women were able to travel to space. Even today, she is still the only woman to have completed a space mission on her own.
Valentina Tereshkova was born in a small village in Russia and did not start school until she was 8 years old. She left school when she was 16 and worked at a textile factory in order to help her mother afford to care for their family. The Soviet government began selecting women to be a part of their space program and Tereshkova was chosen out of over 400 applicants to participate in the program. He family and friends did not know that she would be going to space, and she kept her plans completely secret. She was selected to pilot the Vostok 6 after 18 months of intense training and preparation.
Tereshkova is described as being a hero and an icon for gender equality, not only in Russia but around the world. After her space mission, she entered the political world and represented the USSR at many different international organizations. She also received the 'Greatest Woman Achiever of the Century' award in 2000 for all of her achievements and hardworking.
Robert Goddard
In 1926 Goddard launched the worlds first liquid propellant rocket. It flew for 2.5 seconds and reached a height of 12.5 meters. His paper Liquid Propellant Rocket Development was published by the Smithsonian in 1936. His work went largely unnoticed at the time due o his secrecy but he is now considered the father of modern rocketry.
Making the Modern World
Submerged rigid repeater for Transatlantic Telephone cable
In 1956 the first transatlantic telephone cable, TAT-1, was laid. In the section connecting Newfoundland and Nova Scotia rigid electronic repeaters were included to boost the electrical signals sent through the cable. Another section of the cable connecting Newfoundland and Oban, Scotland used flexible repeaters developed by Bell Telephone Laboratories.

Miss England
The racing boat "Miss England" is currently on display in the London Science Museum. The boats claim to fame is that it won the world championship in 1929 taking the acolade away from the previous champion "Miss America IV". Captained by Henry Segrave it's single motor and lightweight design gave it the edge it needed over the heavier dual engine boat captained by Gar Wood. The manufacturer was the English company called "The Power Boat Company".
Engines
J-2
The J-2 Engine was used in the second and third stages of the Saturn V rocket. Five were used in the second stage and one relight-able one was used in the third stage. Each engine produced 232,250 lbs of thrust in a vacuum which pushed the Saturn V into orbit at 17,400 mph and then onto the Moon at over 24,000 mph.

RL-10
The RL-10 engine was used by NASA to convert missiles into space rockets. Two RL-10s were used in Atlas and Titan rockets, increasing their power. The increased power allowed unmanned spacecrafts to propel to the Moon and towards all the other planets.

V-2
The V-2 engine was critical for the rockets that landed mankind on the Moon. Developed by the German army during the Second World War, the engine propelled the world's first long-range missile. The engine is capable of 25 tons of thrust, boosting the missile 200 miles. This makes it the first vehicle to reach space. Direct descendants of the V-2 engine are responsible for the first US satellite entering into orbit and launching the first American into space.

Level 1
Robots: The 500-Year Quest to Make Machines Human
This temporary, special exhibit showcases the evolution of robotics over the past 500 years. The exhibit is divided into five sections that focus on different time periods and stages in the evolution of robotics. A variety of robots are showcased in the exhibit. Visitors will find an animatronic baby, clocks, early animatronic displays, a model of the robot from "Terminator", social robots and industrial robots. Some of the robots are even running and visitors can interact with them.
Marvel: 1570-1800
Incredibly, robots date back to the late 16th century. In that time, people explained everything through religion and faith. There was the world of heaven and that of the human body. Clockwork was used to model the heavens. People then questioned if they could do the same for the human body. The first step towards robots was the commissioning of mechanical clocks by churches to call the people to worship. Clocks were the mechanization of the heavens as clocks tracked the time of day and important holidays. Clocks also became a symbol of status and wealth. Some of the earliest recognizable robots came in the form of automatons. Many were commissioned for churches and would display scenes such as Jesus' crucifixion or depict Satan. These displays were magical to those viewing them. The 18th century was the golden age for automatons. Often they were created for nobility. They could perform human tasks and often took on their own character. In addition, prosthetics for show grew in popularity. These prosthetics were functional featuring articulating joints and fingers. They were also meant to be seen. Instead of being hidden under clothes they were showcased and were, in the own way, an art form.

Automaton

Prosthetics


Obey: 1800 -1920
The Mechanical Turk was an early robot created to play chess that was supposedly unbeatable. As manufacturing picked up, people thought that if a robot could play chess then it could be put to work in industry. This led to mechanizing factories. Looms became powered by engines. Workers had to work in a mechanized, logical fashion.
Dream: 1920-2009
This is the era of dreaming of robots. People dreamed about the future of robots and how advanced they could become. They also feared the power they might have. In this room, there is a series of humanoid robots on display. These robots bridge some of the gaps between previous robots and more modern ones. Instead of operating through clockwork, these robots ran on batteries and electronics. People dreamed of these robots taking on domestic roles as housekeepers and providing further services to people. One robot on display is George. He was created in 1949 making him one of the first humanoid robots in the UK. He was the fifth in a series of robots created by Tony Sale. Sale began creating these robots at only 12 years old. George was created from scrap aluminum and controlled via an advanced remote control system that was based on instructions encoded in morse code. Other robots on display are movie stars. Maria was created for "Metropolis" a movie by Fritz Lang. She also inspired later cinematic robots including C-3PO from Star Wars. There is also a T-800 Endoskeleton robot from "Terminator Salvation" on display. These robots were the perfect example of people's fears of the power robots could possess.

George
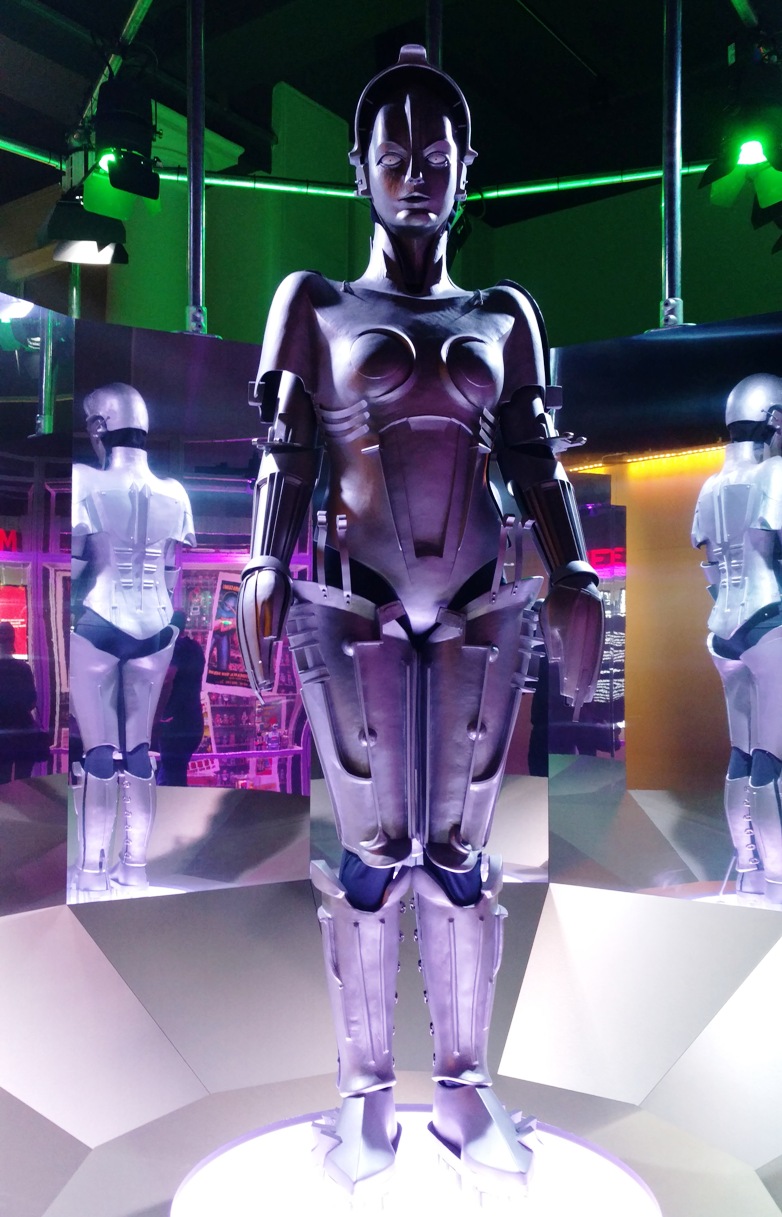
Maria
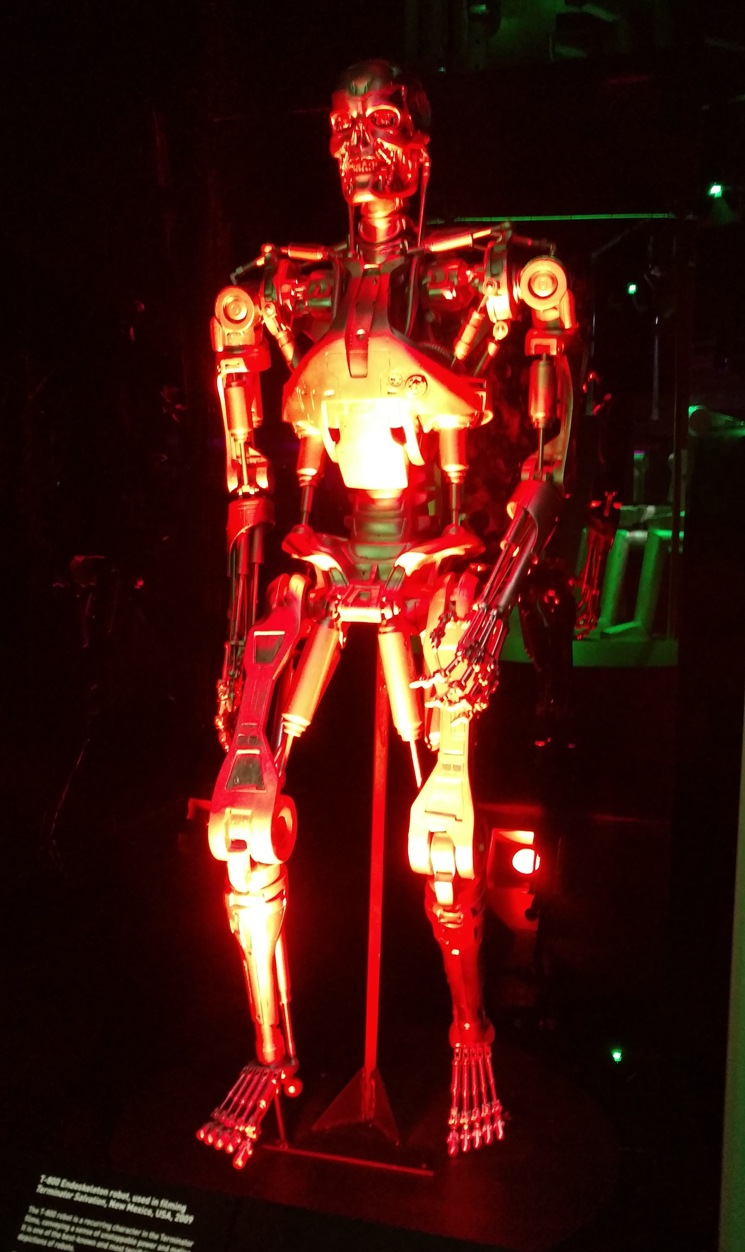
T-800 Endoskeleton



Build: 1920-2009
Society is now in the period of building and advancing robots. Engineers work to create more advanced robots. To do so they often turn to the human body and mind. The mind is the ultimate computer and the body represents our ideal mobility for a robot. In doing so, scientists and engineers are discovering just how complex humans are. In order for a robot to walk on two feet the designers must understand how humans do so. It turns out that it is not as simple as putting one foot in front of the other as it is claimed to be in the movie "Santa Claus is Comin' to Town" by Rankin/Bass Productions. Instead, walking is a complex series of sensing and reacting making it a difficult process for robots. Meanwhile, human brains are able to sense and process the information required to walk in the subconscious parts of the brain. Likewise, attempts to create artificial intelligence have further revealed the complexities of the human mind. The brain is capable of complex and significantly more electrical impulses than any computer currently in existence. Furthermore, the intelligence would have to be able to adapt and learn as a human does. Life is complex and not bound by a simple set of rules. Developing social robots requires an understanding of human interactions. It has been found that people are more comfortable interacting with a robot that does not seem like a robot but acts more naturally. This means that it must be able to express and read emotions. Much of this comes down to understanding micro expressions. Just as engineers are learning new ways to advance robots, they must also learn more about people opening up new fields of study. One of the robots on display is a reconstruction of a Cybernetic Tortoise created by Grey Walter. These robots were created with just a few simple touch and light sensors. Walter created them to test his theory that the equivalent of just a few brain cells could be used to achieve decision making that mimics complex, life like behavior. These robots could navigate his home avoiding obstacles. The Honda P2 robot that can be seen on display is the first independently walking humanoid robot. The designers conducted extensive studies on how humans move to create their design. Nonetheless, the design results in large power consumption. The Byrun robot seeks to address some of the Honda P2's problems through further research on human mobility. This design mimics human bi-articulate muscles. Feedback systems are important for sensing the forces present as the robot walks as humans instinctively do. Nexi is a social robot designed for studying human interactions. The robot can express 21 different emotions. This allows scientists to observe how people react to the robot and how to make robots more comfortable to interact with.
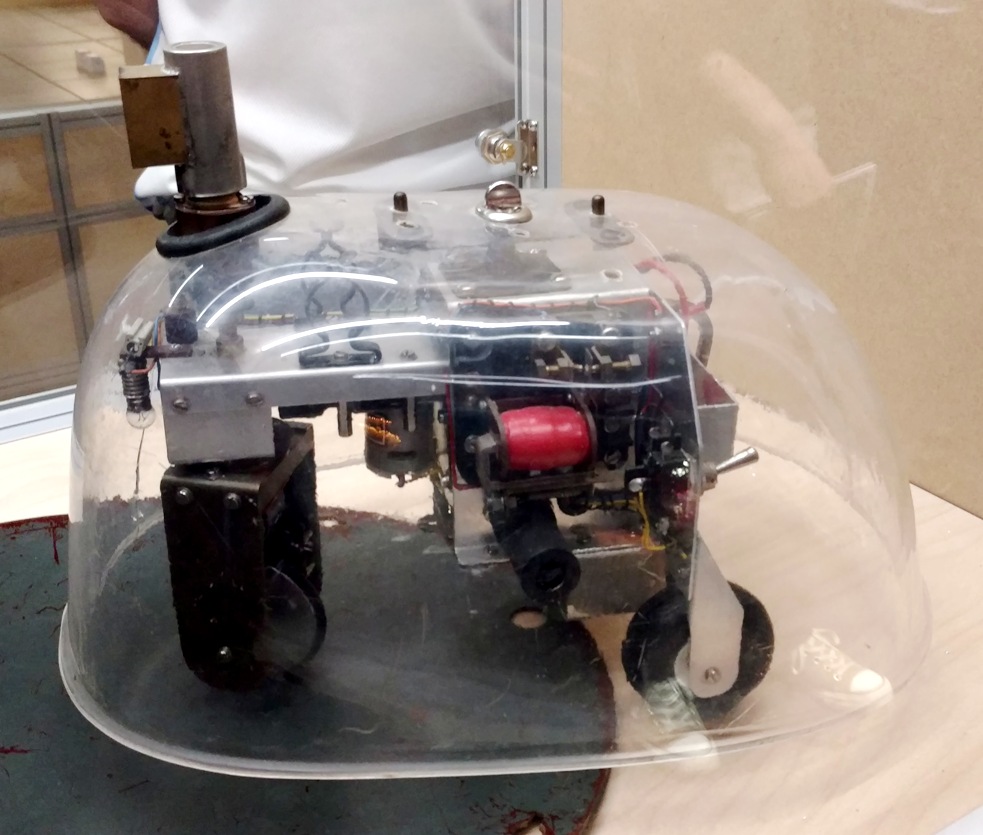
Cybernetic Tortoise
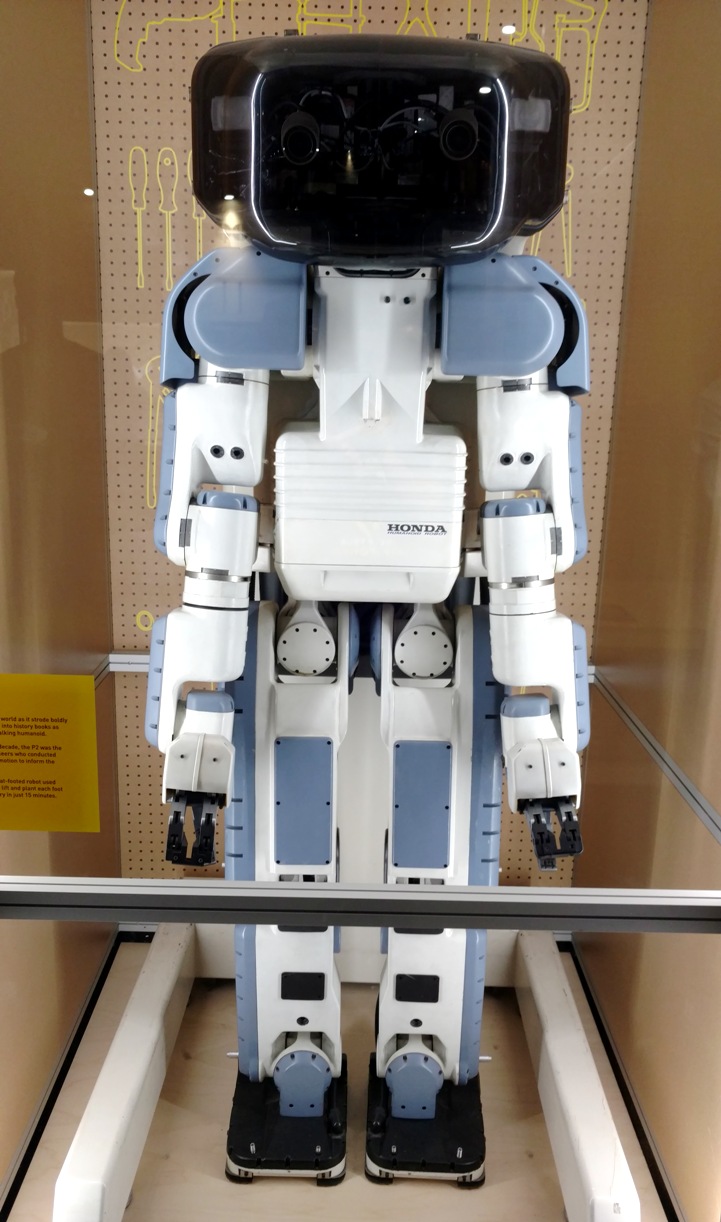
Honda P2
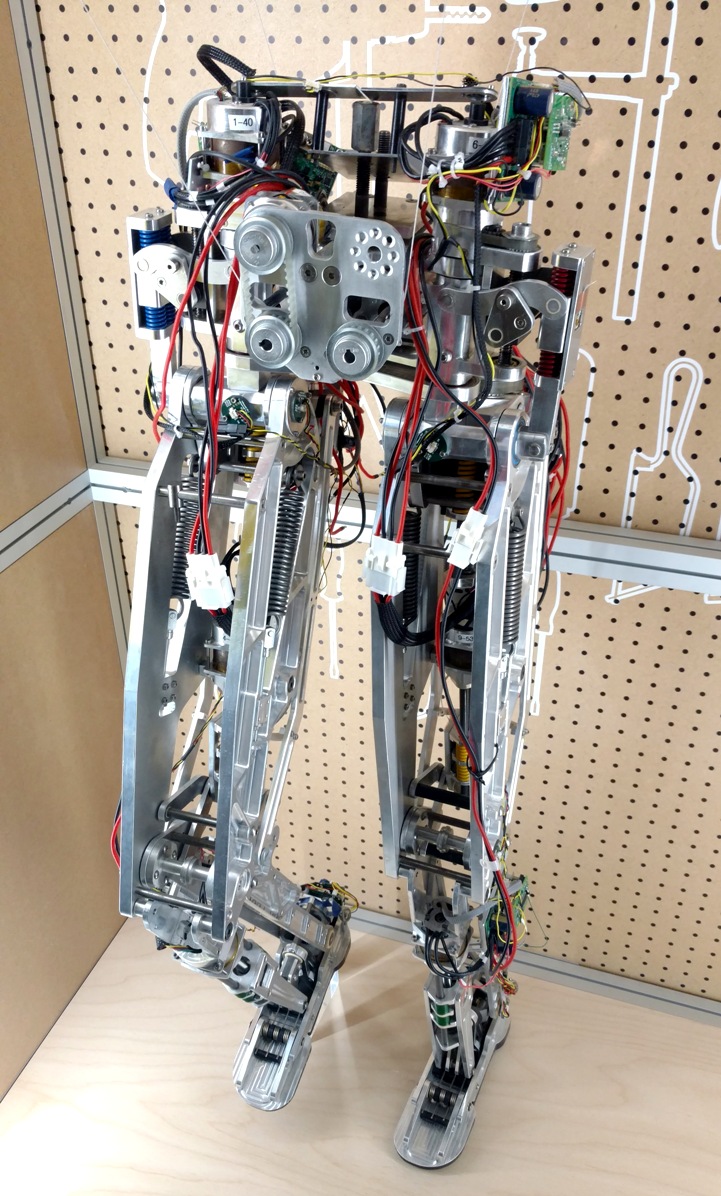
Byrun
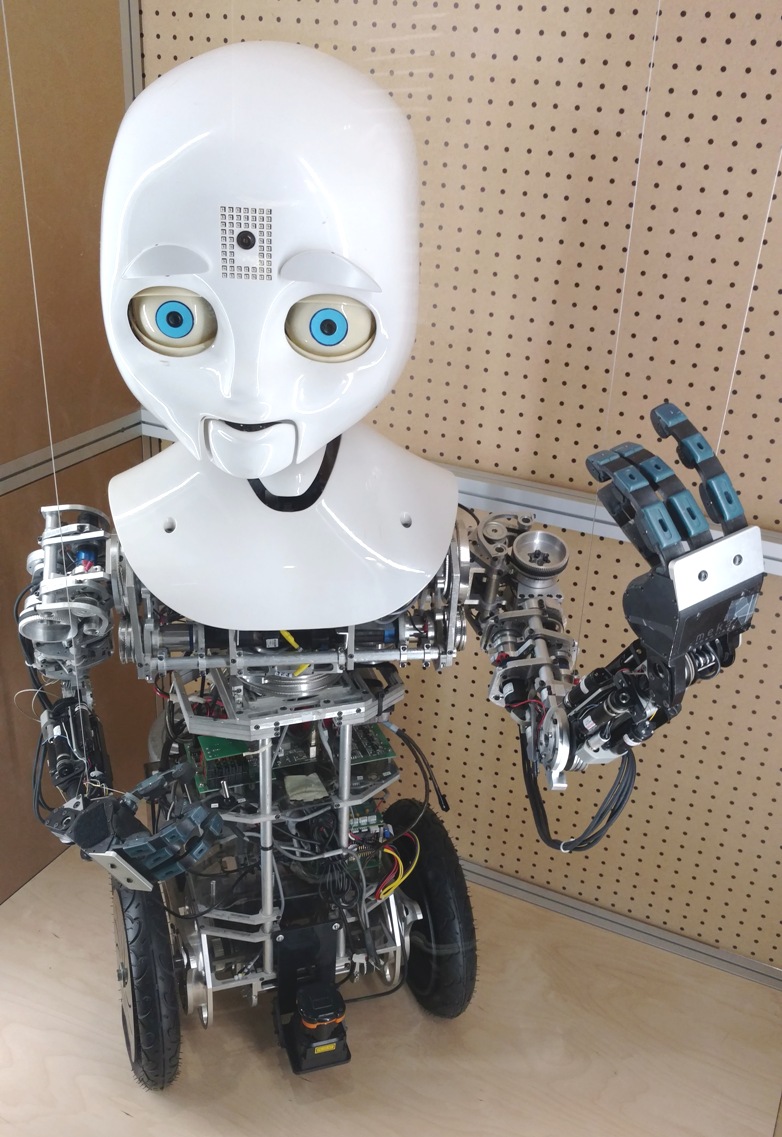
Nexi




Imagine: 2000 -
Social robots and robots with greater intelligence are making there way into society. People no longer are limited to interacting with robots through machine code. Instead people can interact with and program robots through everyday speech and movements. Robots are becoming people friendly meaning that they are both safer to work with and easier to work with. Now it is just up to imagination where robots will go from here. Harry, the trumpet-player robot, was created by Toyota in 2005. It was designed to promote the idea of a caring and intelligent robotic assistant. The robot can play the trumpet as a human would. Artifical lips and a compressor are used to create human like breath. The fingers are highly dexterous in order to play the instrument. In addition, the robot taps its foot and sways its hips as it plays as a human might. Cousin robots, Nao and Pepper, were both created by SoftBank Robotics to be social robots. Nao has become quite popular for use in schools. He is often used with students with disabilities, especially autism. He can easily be programmed on multiple platforms and has many applications that can be downloaded. Pepper is designed to be a companion at home and interact with visitors at public venues. She can detect emotions and respond accordingly as well as move autonomously. Baxter is an industrial robot meant for manufacturing. He is special though in that he is safe to work alongside humans. Unlike many automated manufacturing systems, Baxter does not need to be surrounded by shields. He is safe and features a user friendly interface. He can be programmed simply by moving his appendages to different positions and recording them. Kaspar was designed for working with autistic children. He helps develop skills such as reading facial expressions, taking turns and understanding personal space.

Harry
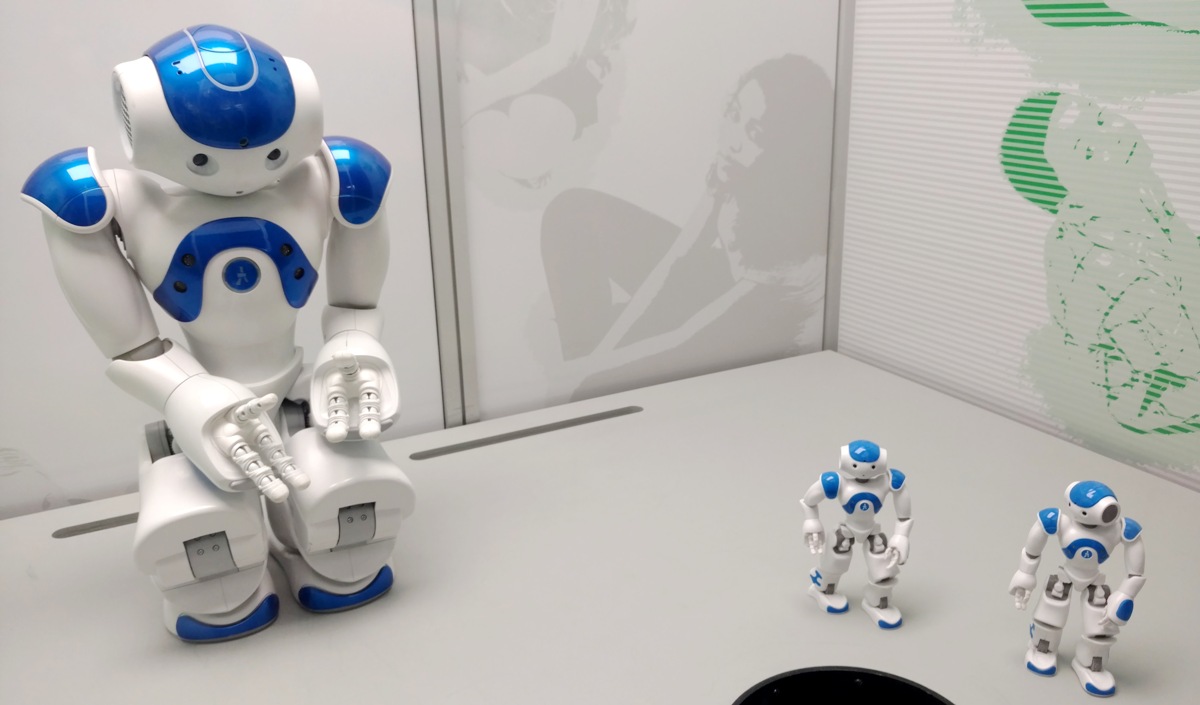
Nao
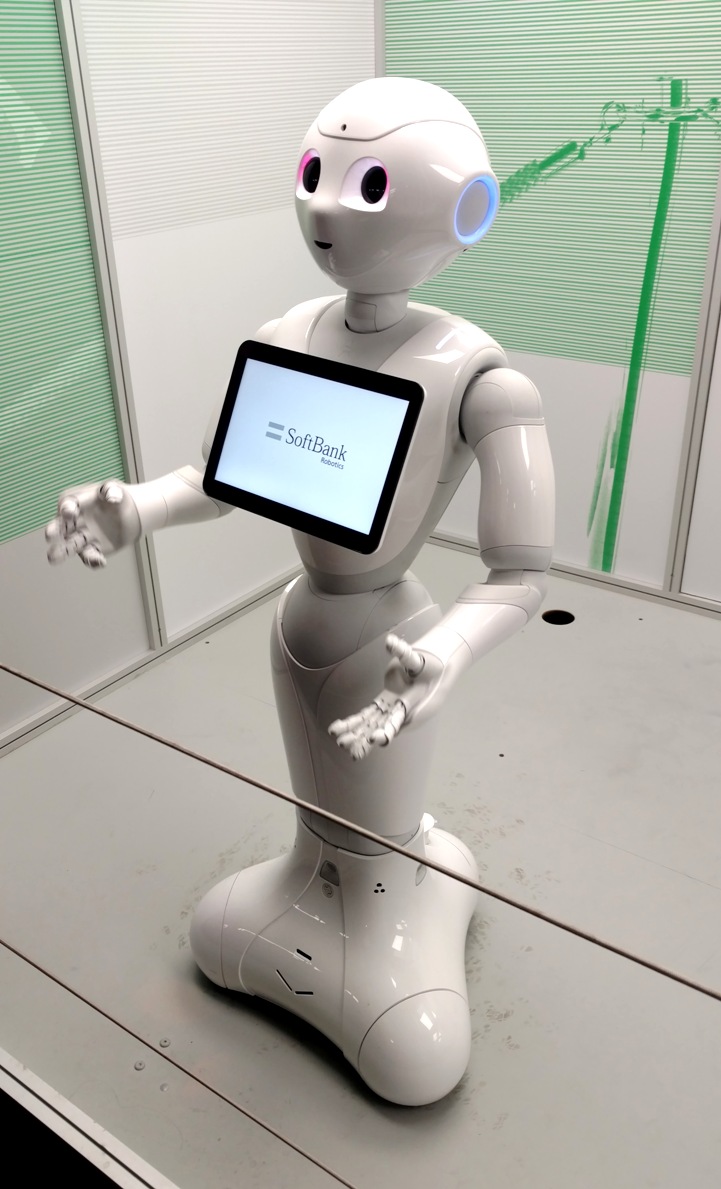
Pepper
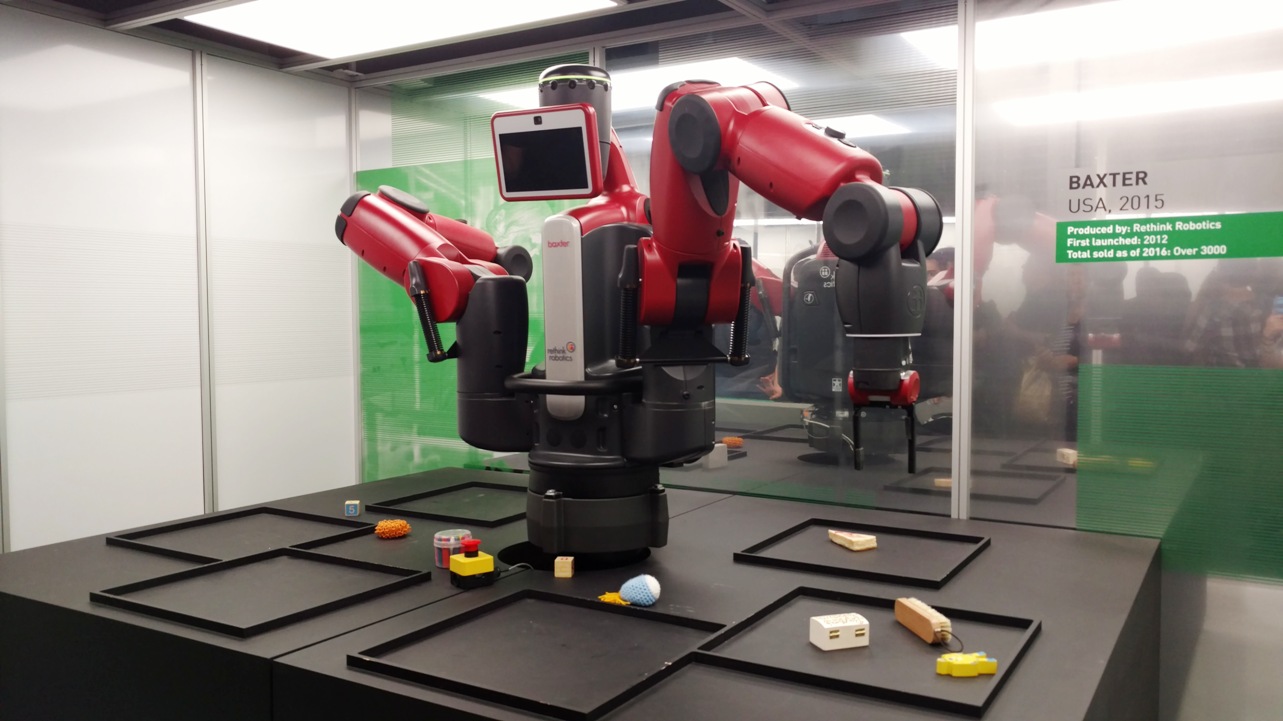
Baxter

Kaspar





Who am I
Text here
Challenge of Materials Gallery
Materials House

Level 2
Atmosphere
Text here
The clockmakers' Museum
This collection of clocks and watches is the oldest of its kind in the world, first begun in 1813 by the Worshipful Company of Clockmakers. The collection was first displayed in 1873 in the City's Guildhall, where it remained until 2014. The purpose of the collection is to tell the story of "The Clockmakers of London."
The collection includes more than one thousand watches, eighty clocks, twenty-five marine chronometers, and over a dozen sundials. These artifacts showcase the history of innovation in clockmaking in London from 1600 to the present day.
Astronomical and Automaton Monstrance Clock by Johann Schneider

This clock is considered by many to be the masterpiece of clockmaker Johann Schneider, and is constructed to conform with the 1577 Augsburg Clockmakers' Guild rules. The clock is adorned by an automaton figure of St. George, standing above a twelve hour dial. The outermost ring of the main dial is a one-year calendar, with each day marked with the name of a corresponding Saint. Inside the calendar ring is a minute ring and a twenty-four hour ring. Inside these is a silver ring showing which hours of the day are light and dark. At the very center of the rings is an astrolabe. The steel hand of the clock shows the minutes, while the gilt hands show the hour and the age of the moon. On the back of the clock are shown the day of the week and the month.
Energy
(interactive area) Text here
Information Age
The Aerial Tuning Inductor
This was an important part of Rugby Radio Station's transmitter that helped to send messages around the world. This device linked the station's electrical generators and the masts outside being tuned in the process. The use of materials such as American whitewood, enamel, and cotton helped to insulate the device and reduce power loss. The purpose of aerial turning inductor was to correct the frequency of the broadcast to allow it to travel across the world.


Journeys Through Medicine
Text here
Mathematics: The Winton Gallery
Text here
Voyages
Text here
The Last Supper
Text here
Level 3
Engineer your Future

This interactive exhibit is designed for young engineers to try to solve future world problems. The first exhibit is the Play Rugged Rovers. In this exhibit, you are to design a space rover to be used on mars. You have to draw a body design and place the wheels. The goal is for the rover to go as far as possible without flipping over or crashing. There is also a big picture game. This game is the building of systems to make our lives easier. They have two versions of this game. One of them requires you to build a power grid to keep everyone having energy. The other one is the designing of a baggage handling system to make sure people don't lose their luggage and that there is nothing dangerous inside. Finally there is Futureville. This game shows the not too distant future to show where engineers engineer in the least expected places. This exhibit is designed for teens aged 11-15 who have in interest in engineering.
Flight
Fly 360
Fly 360 is a flight simulator station. People who step into this station turn into fighter pilots who are tasked with flying a plane in combat. The objective while flying is to take out enemy planes. While in the "cockpit", the people piloting have full control of the plane and they are able fly the as they please. The flying is then accompanied with real time motion where the whole cockpit moves according to how they plane moves. This allows the people inside to get a true feeling for how flying in combat feels.

Silver plated Model of the Forth Bridge
1882 Construction of the Forth Bridge was started The Forth Bridge, when completed in 1890, in 1882 to replace the ferry which carried the was the largest span bridge in the world. 57 men lost their lives. east coast rail link north over the Firth ofForth. During construction The proposal had been vigorously opposed The bridge took seven years tobuild, cost €3 million in the money of the timeand used by the rival rail companies which could over 50,000 tonsofsteel, lt was the largest operate faster via the westcoast routes to civil engineering structure achieved during Perth and the Highlands, This 1:480scale model was built to illustrate the proposal to the nineteenth century, and though William aparliamentarycommittee. Morris described t as the supremest specimen ugliness, remainsone of In 1879, the Tay Bridge had fallen in a storm. the industrial wonders of the world, This disaster ensured that the Forth Bridge auwe uimwaronv was designed using themost thorough structural analysis then possible, lt was also the first bridge to use the new steel produced by the Siemensopen-hearth process. The novel design came from the engineering partnership of Fowler and Baker, William as chief contractor,
Hot Air Balloon
After you pass through the flying simulators on the third floor you enter a gallery room full of airplanes. But one of the first displays is on the hot air balloon, also referred to a cloud in a bag.
Henry Cavendish discovered hydrogen in 1766 which he called 'inflammable air' and proved it was lighter than air. After reading Joseph Priestly's Experiments and Observations on Different Kinds of Air, Joseph Montgolfier started experiments. With help from his brother Etienne, they were able to successful fly small paper and cloth balloons in 1782. The Montgolfier Brothers may not have known all the physics behind the hot air balloon, but they used old shoes and rotting meat as fuel since it created a dense smoke to fill the balloon. In September 1783 they flew a balloon from Versailles so King Lousi XVI and Marie Antoinette could watch as the sheep, cockerel and duck all landed safely. This proved that traveling into the upper atmosphere was not fatal.
J A C Charles was a young scientist who began to experiment with the hydrogen gas after hearing about the Montgolfier's balloons. With help from brother Robert, a small test ballon with rubberizing the silk envelope to retain the gas, was sent off on August 27th, 1783. Charles and Robert then flew for two hours in a life size one on December 1st, 1783. Charles then flew by himself one more time before never flying again.
On display is a model of the hot air balloon that made the first human flight. The two passengers were Pilatre de Rozier, a science teacher, and Francois Laurent. They took off form Bois de Boulogne on November 21st, 1783. It was a dangerous twenty five minute ride over Paris but they safely landed in parkland near the present day Place d'Italie.

References
- ↑ 1.0 1.1 1.2 Museum history. (n.d.). Retrieved June 01, 2017, from http://www.sciencemuseum.org.uk/about-us/history
External Links
London Science Museum Official website
Image Gallery
If appropriate, add an image gallery